强化学习笔记04-无模型(Model Free)策略评估
这一讲的David授课视频与Sutton教材有所不同,将教材的5,6,7三章的前面一部分合并为一讲,主要内容介绍无模型的策略评估。没有模型就需要在经验中学习,本讲介绍两大方法
- Monte-Carlo Evaluation
- Temporal-Difference Evaluation
它们都是基于样本数据评估状态函数,并且有很强的内在联系。
Monte-Carlo学习算法
主要特点
- MC直接重阶段性经验中学习。数据必须为阶段(Episode)形式。
- 每一段数据必须有结束。
- MC无需知道转移矩阵和奖励向量。
- MC不会用其他预估的值函数计算当前值函数
- MC使用均值估计值函数。
核心概念
目标:在策略$\pi$下,从阶段性的经验中学习$v_{\pi}$,数据形式如下
\[S_1^{(1)},A_1^{(1)},R_1^{(1)},\cdots,S_{k_1}^{(1)} \sim \pi \\ \cdots \\ S_1^{(n)},A_1^{(n)},R_1^{(n)},\cdots,S_{k_n}^{(n)} \sim \pi \\\]回报函数定义,$G_t = R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^{t-1} R_T$,$T$表示结束状态
值函数是回报函数的期望,$v(s)=E[G_t \vert S_t=s ]$
MC策略评估使用回报的经验均值作为值函数的无偏估计。评估策略有两个,
- First-Visit
- Every-Visit
下面以First-Visit为例,Every-Visit唯一的区别是在每个阶段内,状态s每次出均统计而不是只统计第一次,first-Visit的效率已经很低了,Every-Visit的效率更低。
- 评估$v(s)$
- 状态s第一次出现的t步
- 状态s计数器$N(s) = N(s) + 1$
- 状态s总回报$S(s) = S(s) + G_t$
- 统计值$V(s)=S(s)/S(s)$
- 根据大数定理,当$N(s) \rightarrow \infty$时, $V(s) \rightarrow v_{\pi}(s)$
均值增量式更新
\[\begin{align} u_k &= \frac{1}{k} \sum_{j=1}^k x_j \\ &= \frac{1}{k} \left(x_k + \sum_{j=1}^{k-1} x_j \right) \\ &= \frac{1}{k} \left(x_k + (k-1)u_{k-1} \right) \\ &= u_{k-1} + \frac{1}{k}(x_k - u_{k-1}) \\ \end{align}\]将MC的计算,使用增量式更新表示,
\[\begin{align} & N(S_t) = N(S_t) + 1 \\ & V(S_t) = V(S_t) + \frac{1}{N(S_t)}(G_t - V(S_t)) \end{align}\]在状态函数非固定(non-staionary)的场景,通常将系数$\frac{1}{N(S_t)}$用常量$\alpha$代替,
\[V(S_t) = V(S_t) + \alpha(G_t - V(S_t))\]以上这种形式,可以非常方便的与TD算法比较。具体实现代码和实验效果参考这里。
Temporal-Difference学习方法
核心思想
- TD无需知道转换矩阵和奖励向量
- TD可以从不完全的阶段数据学习,而不像MC那样必须等待每个阶段结束在学习
- TD通过其他的状态函数估计,更新当前的状态函数
最简单的TD算法记作$TD(0)$,更通用的写法为$TD(\lambda), \lambda \in [0,1]$,后面再展开,现在先关注$TD(0)$。更新算法为
\[V(S_t) = V(S_t) + \alpha(R_{t+1} + \gamma V(S_{t+1}) - V(S_t))\]其中,$R_{t+1} + \gamma V(S_{t+1})$是TD目标,该值区别于非固定MC更新算法的$G_t$,它不需要等待阶段结束,直接通过下一个状态更新即可,所以非常方便。$\delta_t = R_{t+1} + \gamma V(S_{t+1}) - V(S_t)$称为TD error。具体实现代码和实验数据参考这里。
TD与MC的比较
- 数据区别:TD无需等待阶段数据完成,既可学习;MC必须等待阶段数据完成;
- 计算效率:TD实时性好于MC,TD收敛更快;
- 模型效果:MC无偏估计,方差大;TD有偏估计,但是方差小,可以参考10000组21点实验对比。
Monte-Carlo,Temporal-Difference和Dynamic Programming更新比较
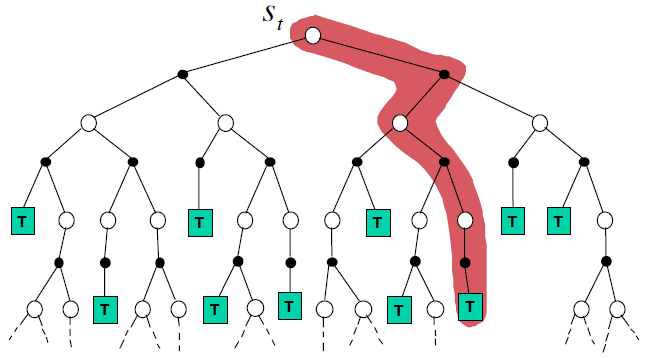
MC更新方式:需要阶段结束,$G_t$统计到结束为止, \(V(s_t) = V(s_t) + \alpha(G_t-V(S_t))\)
TD更新方式:只需要后面一个状态的信息即可,无需采样到底 ,
\[V(s_t) = V(s_t) + \alpha(R_{t+1} + \gamma V(s_{t+1}) - V(s_t))\]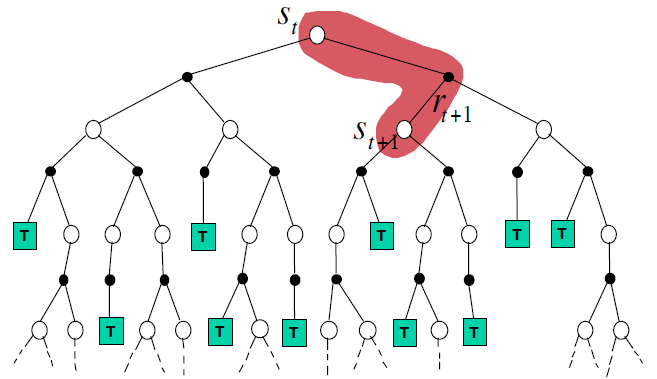
DP更新方式:需要全量信息,即转换矩阵和转换奖励,
\[V(s_t) = E_{\pi}[R_t + \gamma V(s_{t+1})]\]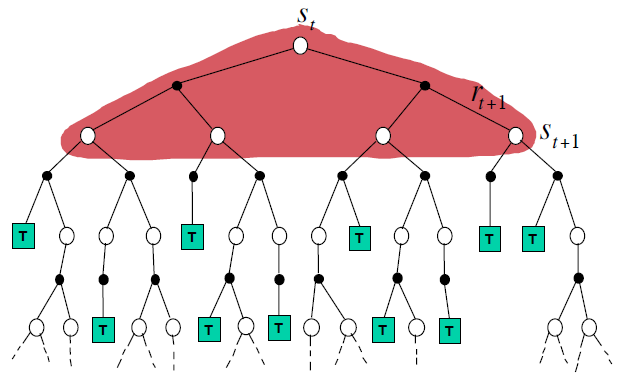
Bootstrapping和Sampling两个核心动作,DP,MC与TD的区别
- Bootstrapping:使用其他预估更新当前状态函数
- DP: YES
- MC: NO
- TD: YES
- Sampling:使用随机样本更新当前状态函数
- DP: No
- MC: Yes
- TD: Yes
其实,TD,MC与DP可以用下面这幅图表示,他们三个分别在三个角落,右上角是理想状态。
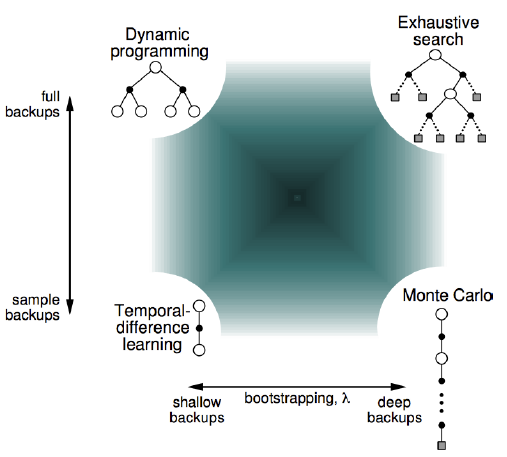
可以看到,TD与MC是有联系,左下角是$TD(\lambda)$,随着$\lambda$变大,可以逐渐变为MC。
n步回报 n-Step Return
定义如下
\[G_t^{(n)} = R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^{n-1}R_{t+n} + \gamma^nV(S_{t+n})=\left(\sum_{k=1}^{n-1} \gamma^{k-1}R_{t+k}\right) + \gamma^nV(S_{t+n})\]- 当$n=1$时,$G_t^{(1)} = R_{t+1} + \gamma V(S_{t+1})$,之前提到的TD中对应的reward。
- 当$n=\infty$时,$G_t^{(\infty)}=R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^{T-1}R_T$,之前提到的MC中对应的reward
所以,从reward角度来看,TD与MC是两个极端。可以定义更为一般的学习算法:n-step TD
\[V(S_t) \leftarrow V(S_t) + \alpha(G_t^{(n)} - V(S_t))\]$\lambda$回报
n-step TD中,什么n最好呢?一种中庸的办法是将所有n都试一遍,然后计算平均值。另一种方法是计算加权平均值,权重定义定义如下
\[G_t^{\lambda} = (1-\lambda)\sum_{n=1}^{T-t-1} \lambda^{n-1} G_t^{(n)} + \lambda^{T-t-1} G_t , \lambda \in [0,1]\]系数之和为1,越近,权重越高,即$\lim_{n \rightarrow\infty}(1-\lambda)\sum_{n=1}^\infty \lambda^{n-1} = 1$。将该定义推广到TD,可表示为$TD(\lambda)$,更新方法为
\[V(S_t) \leftarrow V(S_t) + \alpha (G_t^{\lambda} - V(S_t))\]TD(0)就是之前提到的TD,TD(1)就是MC。这种方法也称之为前向视图,教材中还讨论到后向视图,该视图主要是用于高效算法,无需等待结束,每一次交互,均可以计算出现有阶段z之前的的所有(或部分)$G_t^\lambda$。
 支付宝打赏
支付宝打赏
 微信打赏
微信打赏
您的打赏是对我最大的鼓励!