强化学习笔记08-集成规划和学习-Dyna
最近在准备组内强化学习第5,6讲的分享,顺便回顾了前面的所有内容,所以这篇笔记姗姗来迟。本章的内容是介绍Planning,以及将Learning与Planning结合起来技术。前面的课程中谈到过Planning,即Dynamic Programming。Planning就是在已知Model的情况下计算最优的策略。Planning需要先要根据经验得到模型,大致形式如下
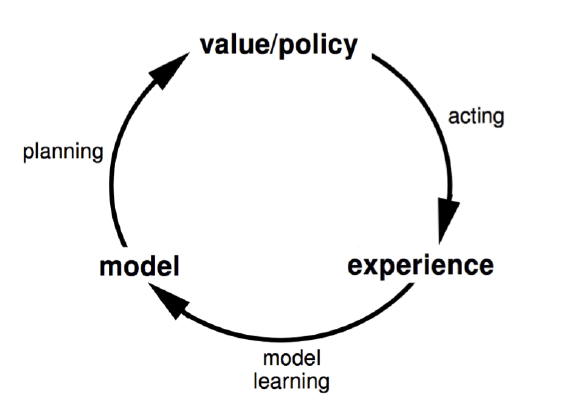
在强化学习领域内,模型就是P(转移概率)和R(奖励),所以模型就是根据状态S和动作A,估计出对应的P与R。这个是不是在哪里遇到过?没错,这个就是监督学习。定义模型为$M=\langle P,R \rangle$,最后求解下面的形式
\(S_{t+1} \sim P_\eta(S_{t+1} \vert S_t, A_t) \\ R_{t+1} = R_\eta(R_{t+1} | S_t,A_t)\) 一般假设状态转移和奖励相互独立。
既然是监督学习,那么就可以使用监督学习中的那些方法求解。当有模型后,可以用之前的动态规划方法求解最优策略。除此之外,还可以利用之前提到的Model Free的方法求解最优策略,把模型当做环境,不断生成样本,那么就是无缝使用MC-Control,SARSA和QLearning等方法。
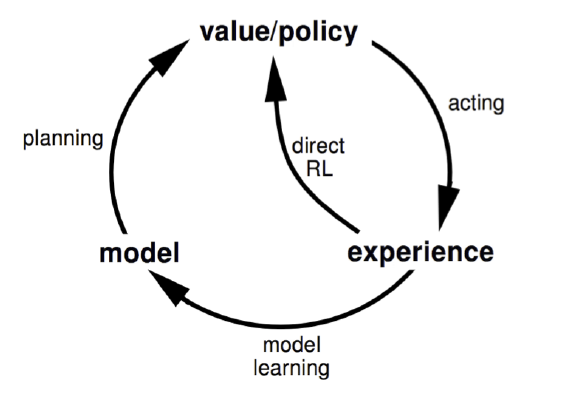
但是模型一定有误差,基于有误差的模型,学习到的策略也不是最优的。所以,比较好的方法是集成Planning和Learning两个过程,model和policy一起学习,相互促进,而不是完全要Model引导Policy。这类方法称为Dyna,流程大体如下
在原始Planing的方法下,整合了Model Free的学习方法。最为基础的算法是Dyna-Q,其伪代码如下
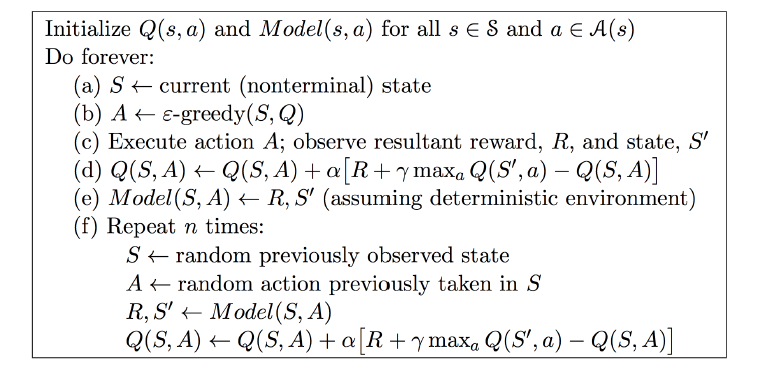
当$n=0$时,Dyna-Q就退化成了Q-Learning。经过一些实验,可以看到Dyna-Q收敛速率比Q-Learing要快很多,因为一旦有了模型,可以自己生成样本自己学习,而不需要与环境交互,有点类似左右互搏的效果。
最后介绍MCTS: Monte Carlo Tree Search。该方法的核心思想就是采样。MCTS通过采样的方法,扩展树的结构,并且不断评估候选状态的值函数。在状态空间特备复杂的情况下,比如围棋。如果每次从起点开始模型,那么效率会非常低。MCTS使用启发式方法,每次在当前一个较好的状态下继续探索,探索方法即使随机样本,直到得到最优的方案。MCTS由于在AlphaGo中应用,被广为人知,下面这张动图可以形象解释MCTS的工作源里,

蒙特卡洛树是什么算法? - fly qq的回答 - 知乎比较容易理解。更为学术资料,可以参考mcts.ai。
分享总结 2018-1-22
本次风向中,谈到了Dyna为什么会比非Dyna收敛快。因为在Dyna中,有个内部simulate,在此过程中,S和A是随机取的,可以尝试一些情况,而这些情况在与真实环境交互时,无法得到。同时,自我交互的过程相当于自己模拟,可以减少真实的交互次数,即减少step次数。
谈到了MCTS,该技术06年发明,后来很多围棋AI都是基于MCTS的优化和改进,最好的一个是日本开发的Zen,但是均没有达到人类冠军的段位,直到AlphaGo的出现,它在MCTS的基础上,融合了深度学习和强化学习,打败了人类冠军。
MCTS在探索的时候,起点是Current State,然后使用Tree Policy只搜索$d$层,$d$层以后的就用随机模拟和其他模拟方法快速的模拟,得到结果,然后更新到根节点。经过k轮后,从当前状态,找到一个最优的action进行扩展,然后继续这个循环。深度学习应用在d层以后,可以直接通过监督学习算出来,而不是模拟出来。如果不用深度学习,在最开始会比较弱,深度学习弥补了开始时比较弱的情况。
 支付宝打赏
支付宝打赏
 微信打赏
微信打赏
您的打赏是对我最大的鼓励!